Citation
(2012), "Robots start playing ice hockey", Industrial Robot, Vol. 39 No. 2. https://doi.org/10.1108/ir.2012.04939baa.004
Publisher
:Emerald Group Publishing Limited
Copyright © 2012, Emerald Group Publishing Limited
Robots start playing ice hockey
Article Type: Mini features From: Industrial Robot: An International Journal, Volume 39, Issue 2
Well not exactly but almost. Professor McPhee of the University of Waterloo, Canada, an avid ice hockey player, and his team saw the need for a hockey stick testing robot. Hockey sticks are increasingly made from composite materials. One advanced design employs a two-piece composite design which is notorious for breaking at inopportune moments in a game. A broken stick can sometimes mean that team loses the game.
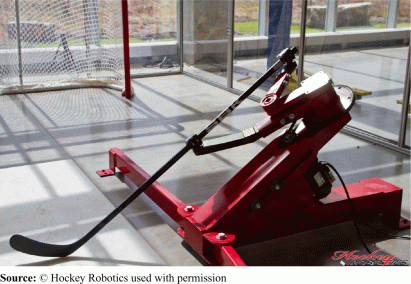
Professor McPhee and his team saw an opportunity to employ robotic technology to exactly test hockey sticks in game like moments. Key to the approach was the realization that while most robots are one armed the hockey robot needed two “hands” just like the human player (see Figure 1). To design the stick-swinging program for the robot, the team took high-speed movies and employed advanced motion-tracking devices to observe players handling sticks and develop a motion database.
This information allowed the team to design a unique two-armed robot to grasp and swing the stick in game like moves of all types. One of the tough hockey stick moves is the slap shot where the player uses both hands and applies great energy to the stick.
When the required movements were understood, the team applied the Siemens PLM Software NX 6CAD tool to detail the required robot geometry. Next they applied Maplesoft’s MapleSim simulation and physical modeling software package to address the mechatronics aspects of the system. This allowed for better understanding of the flexible body deformation of the player which needed to be incorporated in the robot.
The hockey robot, called the SlapShot XT, employs a four-bar mechanism to replicate the hockey player’s motion. A flywheel maintains the stick’s momentum as it contacts the ice surface. The two robot hands gripping the stick which allows the stick to bend about two axes, a moment that first stores and then releases strain energy into the shot.
The robot can “take” a slap shot at up to 176 km/h. The hockey robot is now a business known as Hockey Robotics in Waterloo, Ontario, Canada and for more information or to watch videos robot in action please visit website: www.hockeyrobotics.com
Richard Bloss